Nature Materials
11 September 2024
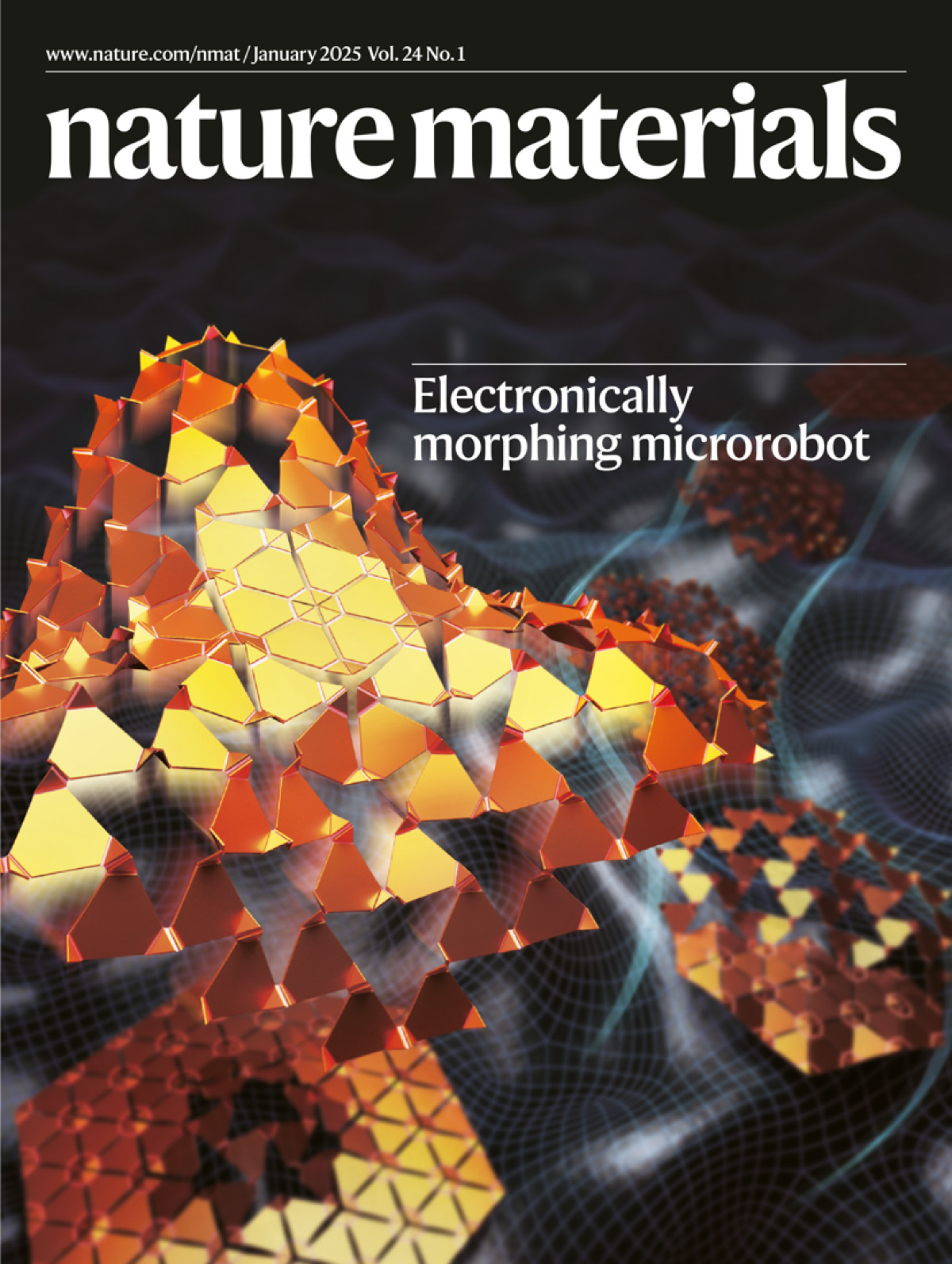
Electronically configurable microscopic metasheet robots
Qingkun Liu1,8,9, Wei Wang1,2,9, Himani Sinhmar2, Itay Griniasty1, Jason Z. Kim1, Jacob T. Pelster2, Paragkumar Chaudhari3, Michael F. Reynolds1, Michael C. Cao4, David A. Muller4, Alyssa B. Apsel3, Nicholas L. Abbott5, Hadas Kress-Gazit2, Paul L. McEuen1,6,7 & Itai Cohen1,6,7
1 Laboratory of Atomic and Solid State Physics, Cornell University, Ithaca, NY, USA.
2 Sibley School of Mechanical and Aerospace Engineering, Cornell University, Ithaca, NY, USA.
3 Electrical and Computer Engineering, Cornell University, Ithaca, NY, USA.
4 School of Applied and Engineering Physics, Cornell University, Ithaca, NY, USA.
5 Smith School of Chemical and Biomolecular Engineering, Cornell University, Ithaca, NY, USA.
6 Department of Physics, Cornell University, Ithaca, NY, USA.
7 Kavli Institute at Cornell for Nanoscale Science, Cornell University, Ithaca, NY, USA.
8 Present address: National Key Laboratory of Advanced Micro and Nano Manufacture Technology, Shanghai Jiao Tong University, Shanghai, China.
9 These authors contributed equally: Qingkun Liu, Wei Wang.
doi.org/10.1038/s41563-024-02007-7
A kirigami metasheet microrobot shows electronically programmable shape morphing and movement.
Anhui Province Academy of Science and Technology, No. 128,Wanshui Road, Hi-Tech Zone, Hefei City, Anhui Province, China
 +86 17354022649
+86 17354022649 service@sondii.com
service@sondii.com





 IPv6 network supported
IPv6 network supported
Our hours
Beijing time: 9:00-18:00